堆取料机定位防碰撞系统在古城电厂应用

图1是河南古城发电厂煤堆场

图2是堆取料机又称斗轮机
数字化煤炭堆场的实现要求能够实时知道斗轮机的精确位置信息,掌握斗轮机的运行轨迹,知道斗轮机在哪里取煤,取了多少煤,从而帮助管理者有效的调度管理。
有了斗轮机精度的位置信息以后还能实现斗轮机的防碰撞,避免生产安全事故的发生。如下图3所示,工作时斗轮机铲斗和安全防护网距离很近,如驾驶人员稍有疏忽就可能导致铲斗和防护网碰撞,造成设备损坏或者其他生产安全事故。

图3
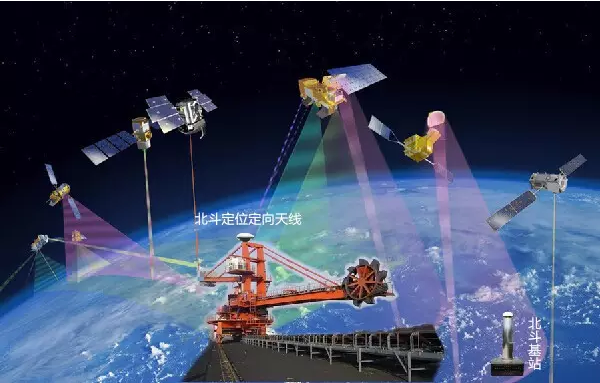
俗话说防范于未然,未雨绸缪先,有关领导对此高度重视。于是决定把这个安全隐患消灭。如下图4所示,在斗轮机上安装高精度的卫星接收设备,通过光纤或者无线传输的方式,把斗轮机的位置信息实时回传到监控中心,通过监控中心软件处理,在斗轮机铲斗或者大臂距离防护网或者其他设施比较近可能发生碰撞时,及时通过声光报警提醒驾驶室工作人员,在距离更近时触发保护电路直接切断电源,防止生产安全事故的发生。
 图4
图4
如下图5所示是软件显示界面,通过软件能够直观看到斗轮机的运行情况,软件后台数据库能够记录斗轮机一天的工作轨迹,在哪个点取煤以及取煤的多少,这样管理人员就能及时补充煤炭库存,电厂发电保证工作顺畅。
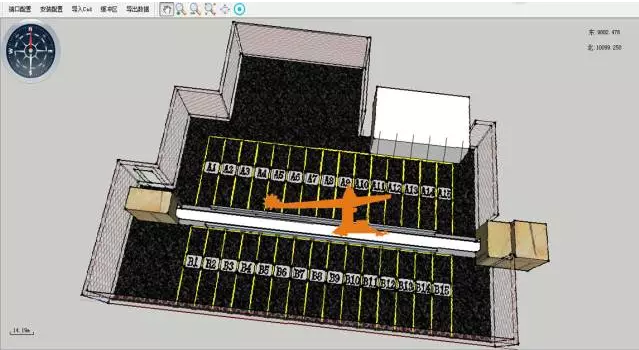
图5
原理简述
如下图6所示是差分基站,他利用了基于载波相位观测值的实时动态定位(RTK)技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集北斗/GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时不足一秒钟。流动站可处于静止状态,也可处于运动状态;可在固定点上先进行初始化后再进入动态作业,也可在动态条件下直接开机,并在动态环境下完成整周模糊度的搜索求解。在整周未知数解固定后,即可进行每个历元的实时处理,只要能保持四颗以上卫星相位观测值的跟踪和必要的几何图形,则流动站可随时给出厘米级定位结果。
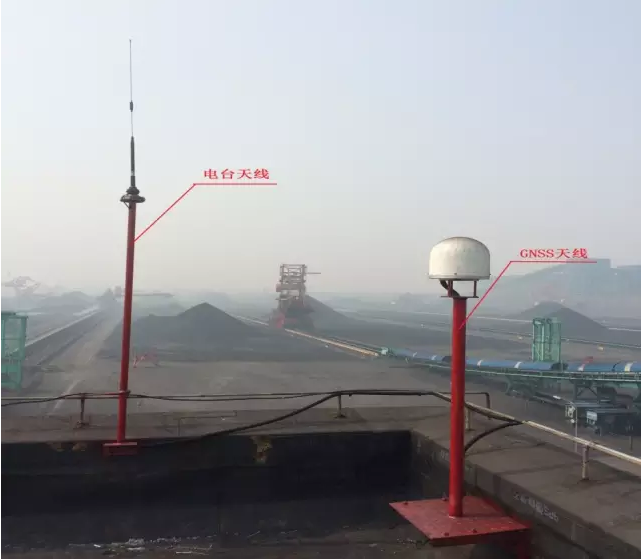
图6差分基站图
高精度定位是数字化堆场必不可少的基础设备,它提供精度的定位信息才能为其他技术数字化的实现提供依据和保障。随着北斗的不断发展和行业应用的不断普及,北斗走进我们的生活,并将大大改善我们的生活。

